What Are Stepper Motors and How do They Work?

Whenever we talk about drones or 3D printers, the term ‘stepper motor’ always seems to find its way into the conversation. After all, it provides the fundamental mechanism for both the extruder and the moving print head of 3D printers, as well as the propellers of drones. If we can understand stepper motors and how they work, then we can gain a deeper understanding of how drones and 3D printers work.
What are stepper motors and what makes them different from regular motors? How do they work and what makes them ideal for 3D printer and drone components?
What is a stepper motor?
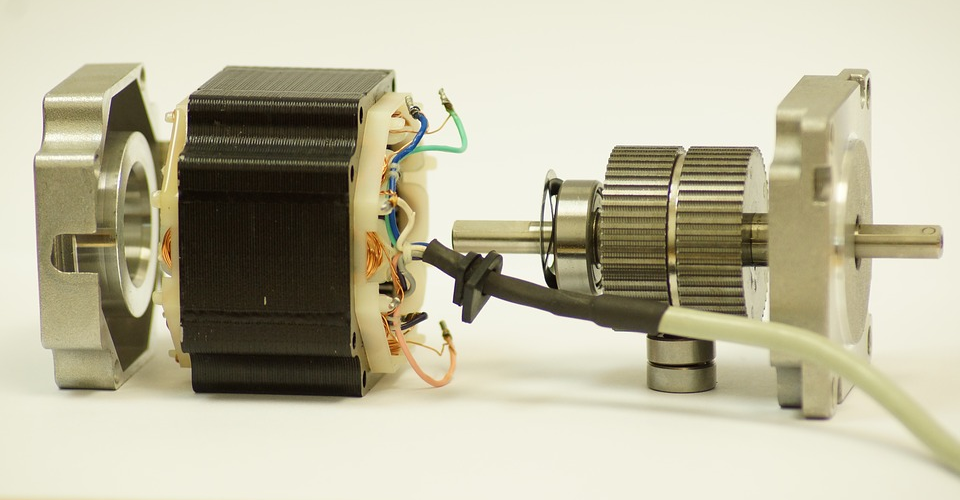
A stepper motor is a DC brushless synchronous electric motor that divides its full rotation along a number of steps of equal magnitude. As with a usual brushless motor, a stepper motor has a central rotor and an outer stator. The contactless nature of a brushless motor makes it less prone to wear and tear, thus reducing the need for frequent maintenance.
The rotation of a standard brushless motor is made possible by the presence of electrical coils around the stator. Electrical current passes through this coil, thus creating a magnetic field that causes the rotor to rotate along the axis of the armature. This rotation completes the transformation of electrical energy to mechanical energy and drives the movement of the gears found in many common devices, including drones and 3D printers.
The presence of multiple electrical coils around a stator is responsible for creating the discrete ‘steps’ characteristic of a stepper motor. To control the rate of rotation of a stepper motor, digital pulses are sent to the stator instead of a single analog voltage. By adjusting the frequency of these pulses or limiting their number, the rate of rotation and position of a stepper motor can be controlled with great precision.
How does a stepper motor work?

The characteristic control of stepper motors is provided by the presence of a series of electrical coils – as many as 200 in some instances. Each coil is located at equal portions of the stator, thus allowing the armature to rotate at a fixed angle for each electrical pulse. For a 200-step motor, each step creates a motor equivalent to only 1.8 degrees.
To initiate the rotation of a stepper motor, a single electrical pulse is sent to one of the electrical coils. This rotates the rotor by a set frequency, putting it in closer alignment to the next electromagnet. The current supply to the first magnet is then shut off and transferred to the next magnet. This repeats the process, allowing for further rotation of the rotor. Each pulse translates to a single “step,” allowing for an integer-based control mechanism for the control of the motor.
For older stepper motors, the behavior of the digital pulse can be described by a square function. However, more modern examples have pulses that follow a sinusoidal wave function. The latter allows for quieter and more efficient motor operations but requires the use of more sophisticated and expensive speed controllers.
Different types of stepper motors
There’s a substantial variety of stepper motors available today. Aside from the different sizes (expressed as NEMA) and number of steps, the performance of a stepper motor can also vary based on the construction of the rotor and the winding of the coils of the electromagnets.
According to rotor construction
1. Permanent magnet motor
The simplest type of a stepper motor, a permanent magnet motor has a basic cylindrical rotor that is permanently magnetized. Due to the nature of magnets, the circumference of the rotor has alternating magnetic polarities. This generates a stronger torque with the same electrical input. However, the presence of alternating polarities also means that the rotor will naturally resist changes to its position, even when an electromagnetic coil has been energized. This greatly reduces the speed of rotation of a permanent magnet motor.
2. Variable reluctance motor

In a variable reluctance motor, the permanent magnet rotor has been swapped out in favor of an iron shaped specifically to align to the magnetic field created by the electromagnets in the stator. With no detent torque, a variable reluctance motor is capable of rotating at much higher speeds. However, the torque it provides is also much lower. Thus, the choice between permanent magnet and variable reluctance motors is a question of speed over power.
3. Hybrid synchronous motor
A hybrid synchronous motor combines the features of the two previous types of rotors – a permanent magnet rotor with a shape that can align with the direction of the magnetic field created by the electromagnets. This means that it also has all the benefits of the two other types of rotors, including a combination of high speed and high torque. The downside of a hybrid motor is that the rotor requires highly complex construction, thus making it significantly more expensive.
Unipolar vs. bipolar motors
1. Unipolar motor
In a unipolar motor, the winding of the coil at each phase of the comes with a center tap. This common wire allows for current supply at either end of the coil, thus creating the possibility of reversing the direction of the magnetic field created by each electromagnet. The construction results in a much simpler circuit while also providing precise control of the angular rotation of the rotor. The downside of this approach is that only half of the coils in each electromagnet is ever energized at any point, thus also reducing the intensity of the magnetic field. This results in a less efficient conversion of electrical energy to mechanical power.
2. Bipolar motor
In a bipolar motor, the winding of each electromagnet comes with only two terminals. Since a stepper motor still needs to retain the ability to reverse its rotation, there still needs to be a mechanism for changing the direction of current across each of the electromagnets. This is achieved by constructing an H-bridge – a rather complex circuit that allows for switching of current direction. While the driving circuit for a bipolar motor is very complex, it creates a motor that leverages the maximum amount of torque that can be produced at each electromagnetic coil.
Benefits and drawbacks of stepper motors
Stepper motors are particularly suitable for applications that require precise motor control. They are also versatile – stepper motors can be found in the tiny extruder of a 3D printer up to the industrial-scale CNC mills. However, not all situations call for stepper motors. Here are some of the pros and cons of stepper motors which can be used to qualify their proper use.
PROS
Precise positioning
Through the use of electrical pulses, stepper motors can maintain highly precise angular positioning. This makes them perfect for applications that use motors for positioning, such as for CNC machines. Once the appropriate number of electrical pulses has been transmitted to the stator element of the motor, it typically has a very good stopping response. The accuracy of stepper motors is usually in the range of 3% to 5%.
Low maintenance and high reliability
The main benefit of a brushless motor lies in the fact that the rotor and stator rotate relative to each other at rapid speeds without needing to make contact. This avoids the problem of accelerated wear and tear for the more old-fashioned (but cheaper) brushed motors. Most industries have started to move towards brushless motors because they greatly reduce the need for maintenance and costly downtimes.
Variable rotations speeds
Stepper motors are incredibly versatile. Simply by varying the frequency of electrical pulses sent to the electromagnets, the speed of rotation of a stepper motor can be varied at a near-granular level. Some stepper motors are also designed to be able to rotate in either direction. A good example of this is the extruder gears of an FDM printer which can both extrude and retract filament.
CONS
Low torque and high noise
To create motion, a stepper motor has to go through several forms of energy transformation. The electrical current creates a magnetic field, which then drives the rotation of the shaft to create mechanical energy. Since energy conversion is never perfect, a portion of the power is lost at every step as either waste heat or friction. This means that stepper motors have a lower ratio of output torque to power input compared to other motors.
Even though a stepper motor may seem like it’s rotating smoothly, it’s actually going through a continuous stop and start cycle at a scale that is not apparent to us. Aside from the inherent inefficiency of such a scheme, it also creates a lot of noise. This is one of the reasons why drones are notoriously very noisy.
Draws current even when stationary
The generation of a magnetic field by an electromagnet requires a continuous flow of current in the winding. The consequence of this is that a stepper motor will continue to draw current, even when it all has to do is to hold the rotor at a stationary position. Otherwise, the rotor will be left to rotate freely. Obviously, this has ramifications on the overall efficiency of a stepper motor for operations that have a lot of downtimes.
Final thoughts
Stepper motors have become very useful in many of today’s commercial products and industrial applications. Aside from their value in terms of control and versatility, what’s even more impressive about stepper motors is the density of technology that has been integrated into their incredibly compact build. While stepper motors are not perfect, they have become standard equipment in a number of different settings.